Sie sind hier:
Sie sind hier:- UlrichC.DE
- Project
- Order
- Dismantling-Manipulator
Dismantling-Manipulator mobiler Manipulator UGV in Fernhantierung
Projektbeschreibung zu UGV Roboterfahrzeug zur Fernhantierung
URL: https://www.ulrichc.de/project/order/dismantling-manipulator/
VON: Christian Ulrich DATUM: 12/2016 STATUS: abgeschlossen
Dismantling-Manipulator ist eine UGV Manipulator-Plattform für Service-, Montage-, und Demontagearbeiten in Fernhantierung. Aufgebaut für Arbeiten in Gefahrenbereichen und steuerbar in allen Funktionen, ist das Fahrzeug zum Arbeiten ohne direkte Sichtverbindung konzipiert.

UGV Manipulator zur Demontage in Fernhantierung
Projektbeschreibung mobilem Manipulator
Aufgebaut als Manipulator für Industrielle- und Urbane Umgebungen ist das Fahrzeug flexibel einsetzbar. Die Kombination aus Kettenfahrzeug mit Kettenauslegern und Roboterarm machen den Roboter zu einem flexiblen Werkzeug in der Fernhantierung.
Das Fahrzeug ist modular aus verschiedenen Einzelkomponenten, Projekten und Produkten zusammengestellt. Viele der Komponenten wurden für dieses Projekt eigens entwickelt oder erweitert.
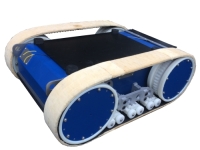
Als Roboterfahrzeug Plattform ist ein ![]() Cu-Chassis-XT(RT)(MAX) entwickelt worden.
Das Kettenfahrzeug basiert technisch auf der Entwicklungslinie der
Cu-Chassis-XT(RT)(MAX) entwickelt worden.
Das Kettenfahrzeug basiert technisch auf der Entwicklungslinie der ![]() XT-Fahrzeugserie. Für den Verwendungszweck mit Flippern adaptiert, ist die Roboterplattform auch in der Lage Treppen zu Fahren und das Arbeiten mit dem Roboterarm zu stabilisieren.
XT-Fahrzeugserie. Für den Verwendungszweck mit Flippern adaptiert, ist die Roboterplattform auch in der Lage Treppen zu Fahren und das Arbeiten mit dem Roboterarm zu stabilisieren.
Der Roboterarm mit Greifer wurde als autarke Komponente adaptiert. Entsprechend der Projektanforderungen angepasst kann der Arm mit bis zu 20Kg arbeiten und verschiedene Werkzeuge nutzen. Fahrzeug und Roboterarm bilden eine Systemeinheit für ein kompaktes Robotersystems.
Das Robotersystem kann mit einem mobilen Bedienpult gesteuert werden. Stromversorgung und Steuerung sind kabelgebunden auf einer Länge von 30Metern und mehr. Netzwerkfähig aufgebaut, ist das System auch mit Leitstand-, Kamera- und Funksystemen adaptierbar.
Auszug aus Projektanforderungen
- Einsatz in kritischer Infrastruktur
- Greifen in 1.80 Metern Höhe
- Manipulieren ohne direkte Sichtverbindung
- Einsatzzeitraum ca. eine Woche
- Einsatzzeit pro Tag ca. 6 Stunden
- Steuerung über Ethernet
- Bewegen von Objekten mit bis zu 20Kg
- Sicheres Überwinden von Hindernissen
- Befahren von Treppen
- uvm.

Projektunterlagen zu mobilem Manipulator Dismantling-Manipulator
Unterhalb sind Projektunterlagen zu Dismantling-Manipulator gelistet. Die Dokumente unterhalb sind vorwiegend als PDF-Datei formatiert.
| Dokument | Beschreibung |
|---|---|
_v1.de.pdf.jpg "UGV Datenblatt")
|
Dismantling-Manipulator
Datum : 23.06.2019
|
_v1.de.pdf.jpg "UGV Abmessungen")
|
Dismantling-Manipulator
Datum : 23.06.2019
|

Bilder zu mobilem Manipulator Dismantling-Manipulator
Unterhalb sehen Sie eine Sammlung von Bildern zum UGV Manipulator.

Dismantling Manipulator

Manipulator Roboterfahrzeug

Kettenfahrzeug Manipulator

Roboterfahrzeug Kettenausleger

Links zu Roboterfahrzeug Dismantling-Manipulator
Unterhalb wurde eine Sammlung von verwandten Links zum UGV Manipulator zusammengestellt.
(UlrichC.DE haftet nicht für das Online-Angebot der extern(

Roboterplattform RT-MAX

Bedienpult

Roboterarm Gen.3

OpenSource Manipulator

UGV Kettenroboter zur Fernhantierung

Bei Fragen, Anregungen und Kritik zu diesem Projekt würde es uns freuen wenn Sie direkt eine
Weitere mobile Roboterfahrzeuge