




 Sie sind hier:
Sie sind hier:- UlrichC.DE
- Project
- Aktuell
Aktuelle und abgeschlossene Projekte
(Aktuell laufende und kürzlich abgeschlossene Projekte)
Unterhalb ist ein Auszug der aktuell in Arbeit befindlichen und kürzlich abgeschlossenen Projekte gelistet.
Die Projekte befinden zum Teil auch in Nutzung und Testphasen. Nach Anpassungen und Erweiterungen werden in die Projekte für das ![]() Projektarchiv.. dokumentiert.
Status-Änderungen innerhalb der Projekte, also von Begin über Test bis hin zu abgeschlossen, werden auch über
Projektarchiv.. dokumentiert.
Status-Änderungen innerhalb der Projekte, also von Begin über Test bis hin zu abgeschlossen, werden auch über ![]() Benachrichtigung bekannt gegeben.
Benachrichtigung bekannt gegeben.
Bei Fragen zu einzelnen Projekten, können Sie direkt mit dem ![]() Kontaktformular eine Benachrichtigung hinterlassen.
Kontaktformular eine Benachrichtigung hinterlassen.

Ferngesteuerter Benzin Rasenmäher
Cu-RC-Mower
12/2020Ferngelenkter Benzinrasenmäher auf Basis des Cu-Robot-Drive.
Der Cu-RC-Mower ist als Roboterplattform mit Rasenmäher-Anbau aufgebaut. Der voll funktionale Rasenmäher wird für Mäharbeiten an schwer zugänglichen Orten genutzt.
Von: UlrichC.DE
Entwicklungsstand: Abgeschlossen
Aktuell: Im Einsatz

Cu-Pixhawk-Rover mobiler Roboter Video-Rover
Cu-Pixhawk-Rover
06/2020Entwicklung einer Steuerungsadaptierung auf Pixhawk-Rover.
Innerhalb dieses Projekts wurde ein mobiler Roboter auf Basis der Pixhawk-Steuerung aufgebaut.
Von: UlrichC.DE
Entwicklungsstand: abgeschlossen
Projektlaufzeit Umsetzung.: 2PM
Projektlaufzeit ges.: ~
Aktuell: Im Einsatz

Cu-FPV-Case FPV Video Koffer
Cu-FPV-Case
09/2019Cu-FPV-Case FPV- Videoübertragung für den mobilen Einsatz.
Kompakter Videokoffer für die FPV-Übertragung von mobilen Geräten.
Von: UlrichC.DE
Entwicklungsstand: abgeschlossen
Projektlaufzeit ges.: 1PM
Aktuell: Im Einsatz

Cu-Copter-X130 Freestyle-Copter Drohne
Cu-Copter-X130
06/2019Entwicklung eines 3 Zoll Quadrocopters auf Basis eines 130 Frame.
Innerhalb dieses Projekts wurde ein miniaturisierter Quadrocopter aufgebaut.
Von: UlrichC.DE
Entwicklungsstand: abgeschlossen
Projektlaufzeit Umsetzung.: 2PT
Projektlaufzeit ges.: ~
Aktuell: Im Einsatz

Kamera Drehantrieb
Cu-Pan-Drive
11/2018Kamera Drehantrieb zur Erweiterung mobiler Robotersysteme.
Kamera Drehantrieb wurde als elektromechanische Komponente zur Ergänzung einer mobilen Plattform entwickelt. Mit dieser Erweiterung können Kameras und Vorrichtungen horizontal um 360 Grad gedreht werden.
Von: UlrichC.DE
Entwicklungsstand: 100%
(Erweiterungen nach Bedarf)

Multikopter Start- und Landevorrichtung
Cu-Copter-Hangar
10/2017Entwicklung einer Multikopter Start- und Landevorrichtung für mobile Roboterfahrzeuge.
Innerhalb dieses Projekts wurden Multikopter Start- und Landevorrichtungen gebaut.
Von: UlrichC.DE
Entwicklungsstand: abgeschlossen
Projektlaufzeit ges.: 1PM
Aktuell: Im Einsatz
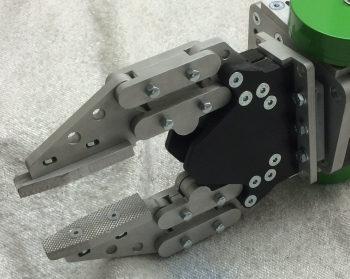
Greifer
Cu-Gripper3
10/2016Greifer für Roboterarme zur Erweiterung mobiler Robotersysteme.
Von: UlrichC.DE
Entwicklungsstand: 100%
(Erweiterungen nach Bedarf)

Roboterarm
Cu-Robotarm3
11/2016Roboterarm für mobile Manipulatoren in Fernhantierung.
Der Roboterarm ist als elektromechanische Komponente zur Ergänzung mobiler Roboterplattformen gebaut.
Von: UlrichC.DE
Entwicklungsstand: 100%
(Erweiterungen nach Bedarf)

Roboter Konzept
Cu-Robot
10/2009Basiskonzept zur Entwicklung mobiler Robotersysteme.
Das Basiskonzept beinhaltet Konzepte und Beschreibungen für den Aufbau mobiler Roboter und Systeme von UlrichC.DE.
Von: UlrichC.DE
Entwicklungsstand: 100%
(Erweiterungen nach Bedarf)



