Sie sind hier:
Sie sind hier:- UlrichC.DE
- Project
- CU-MANIPULATOR
Cu-Manipulator mobiler Roboter mit Roboterarm
Projektbeschreibung zu Manipulator für mobile Roboter mit Roboterarm
URL: https://www.ulrichc.de/project/cu-manipulator/
VON: Christian Ulrich DATUM: 01/2009 STATUS: abgeschlossen

Mobiler Manipulator
Entwicklung eines mobilen Manipulators für Fernuntersuchungen und Fernwartung .
Cu-Manipulator wurde aus dem Radfahrgestell ![]() Cu-Wheel-Chassis und dem Roboterarm
Cu-Wheel-Chassis und dem Roboterarm ![]() Cu-Robotarm kombiniert. Der so entstandene Manipulator wurde nach dem Vorbild eines EOD-Roboters in kompakter Bauweise aufgebaut.
Cu-Robotarm kombiniert. Der so entstandene Manipulator wurde nach dem Vorbild eines EOD-Roboters in kompakter Bauweise aufgebaut.
Projektverwendung Manipulator
Als schlichtes Radfahrzeug mit Roboterarm wird Cu-Manipulator zum Manipulieren eingesetzt. Roboterarm und Fahrzeug sind auch auf extrem langsame und zugleich kraftvolle Bewegungen ausgelegt.
Der Manipulator wird zweitweise bei Kunden und auch für unsere eigene Entwicklung eingesetzt. Das Fahrzeug ist sozusagen die praktische Grundlage für die Entwicklung unserer Manipulatoren. Die Konstruktion birgt verschiedene Lösungsansätze, die sich in der Praxis für andere Aufgaben umwandeln lassen.
Projektanforderungen zu Manipulator
Die Anforderungen wurden in erster Linie anhand einer definitiven Projektanfrage definiert.
Ursprünglich wurden die Anforderungen natürlich praxisorientiert formuliert.
- Robuste Bauform
- Wetterfestigkeit
- Kabel- und Funkbedienung
- Kameraunterstützung

Projektunterlagen zu Manipulator Cu-Manipulator
Unterhalb sind aktuelle Projektunterlagen zu Cu-Manipulator gelistet. Die Dokumente unterhalb wurden alle in PDF-Format gebracht.
| Dokument | Beschreibung |
|---|---|
_v1.pdf.jpg "Abmessungen Technische Skizze")
|
Abmessungen
Datum : 21.01.2009
|
_v1.pdf.jpg "Technische Skizze")
|
Arbeitsbereich
Datum : 21.01.2009
|

Bilder zu Manipulator Cu-Manipulator
Unterhalb sehen Sie eine Sammlung von Bildern zum Manipulator.
(Weitere Bilder sind bei den Plänen zu Cu-Manipulator bzw. auch bei der Fahrgestell-Konstruktion sowie bei den Projektaufzeichnungen zum Manipulator hinterlegt.)

Manipulator Plattform

Roboter Greifer

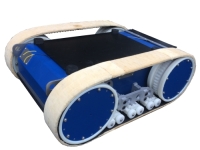
6Rad Roboterplattform
.jpg "Bild Manipulator Steuerungsgehäuse")
Manipulator Steuerungsgehäuse

Links zu Manipulator Cu-Manipulator
Unterhalb wurde eine Sammlung von verwandten Links zum Manipulator zusammengestellt.
(UlrichC.DE haftet nicht für das Online-Angebot der extern(

OpenSource Roboterarm

Freie Konstruktion 6WD Fahrgestell

Bedienpult

UGV Kettenroboter zur Fernhantierung

Roboter für Demontagearbeiten

Bei Fragen, Anregungen und Kritik zu diesem Projekt würde es uns freuen wenn Sie direkt eine
Weitere mobile Roboterfahrzeuge