Sie sind hier:
Sie sind hier:- UlrichC.DE
- Project
- CU-PIXHAWK-ROVER
Cu-Pixhawk-Rover Pixhawk-Erweiterung für mobiler Roboter mit Videoübertragung
Projektbeschreibung zur Roboter-Erweiterung für mobiler Roboter Rover auf Basis einer Pixhawk-Steuerung.
URL: https://www.ulrichc.de/project/cu-pixhawk-rover/
VON: Christian Ulrich DATUM: 06/2020 STATUS: abgeschlossen


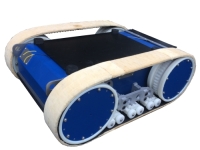
Cu-Pixhawk-Rover mobiler Roboter Rover
Pixhawk ist bekannt als eine professionelle Software für UAV Drohnen. Nicht so bekannt aber durchaus gangbar ist, die Verwendung dieser Software für bodengebundene UGV-Systeme. Für Pixhawk sind neben Modulen für Drohnen, auch Module für Schiffe, Flugzeuge, Rover und weitere verfügbar. Die Funktionen für UGV Systeme sind im Modul namens Rover abgebildet. Um diese Software auf unseren mobilen Robotern im vollen Umfang verfügbar zu haben, wurde das Projekt Cu-Pixhawk-Rover gestartet. Innerhalb dieses Projekts wurde ein modularer Aufbau für Pixhawk und dessen Steuerung entwickelt, der auf unsere Fahrzeuge passt. Der Aufbau umfasst Steuerung, Funk und Videoübertragung sowie eine Reihe von Erweiterungen für GPS und mögliche Sensoren.
Als Ergebnis entstand ein modularer Steuerungsaufbau mit HD Videoübertragung.
Evaluierung
Das Projekt ist ursprünglich nicht als Pixhawk-Studie gestartet. Bevor der Aufbau entworfen und umgesetzt wurde, standen schlicht nur entsprechende Anforderungen im Raum.
Gesucht wurde eine modulare und freie Steuerungslösung mit folgenden Features.
- mit Missionsplanung
- mit GPS-Wegpunktnavigation
- offene Schnittstellen
- offenen Hardware-Standards
- Power Management
- Gyro-Funktionen
- GPS-Funktionen
- HD-Videoübertragung
- Hardware Bildstabilisierung
- gute Verfügbarkeit
- gute Support-Plattformen
- bewährte Technik
Aufbau
Der Aufbau umfasst die Elektronik-Integration der Elektronik und deren Adaptierung.
Elektronik
Der Name Pixhawk steht für Software die eine Reihe Hersteller bzw. deren Elektronik unterstützt.
Für den Aufbau wurde überwiegend die Elektronik von HEX eingesetzt. Peripher sind zudem Elektroniken der Hersteller Holybro und Tarot verbaut.
Die Liste der Komponenten des Cu-Pixhawk-Rover.
- HEX Cube (Pixhawk 2.1)
- HEX HereLink
- Holybro Pixhawk PX4 Power Management Board
- HEX Here+ GPS
- HEX Here+ RTK GNSS
- Tarot Gimbal-Elektronik
Kamera
Als Kamera zur Bildübertragung wurden verschiedene Kameramodelle getestet und adaptiert. Die Liste der verwendeten Kameras.
- GoPro 4, 6 und 7
- Foxeer Box2
- Hawkeye Firefly split 4k
- Firefly Q6
Software
Als Software wurde Pixhawk Modul Rover, Ardupilot und die Herelink-Software eingesetzt. Die Steuerungskonfiguration ist komplex aber insgesamt einfach durchführbar.
In der Praxis
Ein mobiler Roboter mit dem Pixhawk-Aufbau kann mittels der verbauten HD-Videoübertragung auch in FPV gefahren werden. Die Reichweite ist misst sich, je nach Einsatz-Gebiet und Hintergrund, in Kilometern.
Die Bedienung ist intuitiv und macht, vielleicht auch weil parallelen zu einem Videospiel bestehen, sogar Spaß. Dies führt leider manchmal dazu, dass der Roboter beim Kunden auf dem Dach zum liegen kommt. In einer Folgeversion des Aufbaus ist daher zusätzlich ggf. ein Überrollbügel in Planung.
Die auf einem 4-Rad Fahrzeug getestete die Wegpunktnavigation funktionierte nach einer Trimmung der Motoransteuerung reibungslos. Dieses Feature ist somit eine Option aber bei der derzeitigen Verwendung kein Thema.

Bilder zu Aufbau für mobile Roboter Cu-Pixhawk-Rover
Unterhalb finden Sie eine Sammlung von Bildern zum Cu-Pixhawk-Rover Roboteraufbau.





Links zu Cu-Pixhawk-Rover Video-Rover
Unterhalb wurde eine Sammlung von verwandten Links zum Cu-Pixhawk-Rover mobiler Roboter zusammengestellt.
(UlrichC.DE haftet nicht für das Online-Angebot der extern(

Roboterplattformen für mobile Roboter

Police-Robot Projekt

CU-Robot:Video

Bei Fragen, Anregungen und Kritik zu diesem Projekt würde es uns freuen wenn Sie direkt eine
Weitere mobile Roboterfahrzeuge