Sie sind hier:
Sie sind hier:- UlrichC.DE
- Project
- 3rdparty
- Rc-Rasenmaeher
Wolfi`s RC-Mäher Ferngesteuerter Rasenmäher mit Benzinmotor
Externes Projekt RC-Benzinrasenmäher. Ferngesteuerter Rasenmäher mit Benzinmotor.
URL: https://www.ulrichc.de/project/3rdparty/rc-rasenmaeher/
VON: Wolfgang DATUM: 10/2011 STATUS: abgeschlossen

Wolfi`s RC-Mäher - Ferngesteuerter Rasenmäher
Wolfi`s RC-Mäher umschreibt den Aufbau eines Wiesenmähers mit Fernsteuerung.
Der Entschluss eine großflächige Wiesenfläche ferngesteuert zu mähen war der Indikator zum Bau des Mähers.
Innerhalb dieses Projekts ist ein komplettes Mähgerät mit Fernsteuerung entstanden. Der Mäher befindet sich saisonal im Einsatz und wird auch von Zeit zu Zeit verbessert.
Projektbeschreibung RC-Benzinrasenmäher
Es galt eine Wiese, teilweise in Hanglage mit Sträuchern und Bäumen an den Geländegrenzen, zu mähen. Diese, im Vergleich zu einer ebenen Wiese, anstrengende Aufgabe sollte zukünftig ein fernsteuerbarer Mäher übernehmen. So entstand der Plan einen ferngesteuerten Mäher zu bauen, dieser dann letzen Endes in Wolfi`s Tüftler-Werkstatt umgesetzt wurde. Sonst entstehen in seiner Werkstatt überwiegend feinmechanische Präzisionsteile für Montierungen zur Himmelsbeobachtung. Mit diesem Projekt kam die etwas gröbere Art des Bastelns hinzu. Die Projektanforderungen wurden gemessen an dem zu mähenden Grundstück festgelegt. Speziell die Antriebsleistung und die Abmessungen des Mähers wurden dabei nicht zu knapp bemessen.
Technische Daten:
Abmessungen: ca. 60 x 100cm
Gesamtgewicht: ca. 40Kg
Geschwindigkeit: ca. 4Km/h
Antrieb: 2 Motoren je 350 Watt
Antriebskraft: 9.47Nm
Mechanischer Aufbau zu RC-Benzinrasenmäher
Der gesamte Aufbau wurde LowCost aus handelsüblichen Bauteilen gestaltet. Unterhalb ist der Aufbau des Mähers in groben Zügen umschrieben.
Chassis
Der Chassis-Rahmen des Mähers wurde aus Stahlrohr verschweißt. Das Material bot neben der Stabilität auch den Vorzug der Flexibilität. Mit Stahlrohr kann direkt auf der Werkbank konstruiert werden. Änderungen können umgehend vorgenommen werden ohne die Stabilität der Gesamtkonstruktion einzuschränken.
Antrieb
Als Antriebsmotoren kommen so genannte Scooter-Motoren zum Einsatz. Artverwandt mit Rollstuhlmotoren, haben die 350 Watt DC-Motoren eine Abtriebs-Zwischenuntersetzung integriert. Eigentlich für Mit 24 Volt ausgelegt, werden die Motoren am Mäher für einen langsameren Betrieb mit nur 12 Volt betrieben.
Zusätzlich wird die Antriebskraft durch eine Kettenuntersetzung 40/50:15 verstärkt.
Der Rasenmäher arbeitet kontinuierlich mit einer Geschwindigkeit von 4Km/h. Was nach natürlichen Maßstäben in etwa der normalen Schrittgeschwindigkeit eines Menschen entspricht.
Akkus
Für die Stromversorgung, kommen zwei Bleigelakkus zum Einsatz. Mit 2x 14Ah also insgesamt ca. 28Ah bei 12 Volt liegt die theoretische Fahrzeit, gemessen am Motorstrom, bei ca. 50 Minuten Mähzeit. Eine zusätzliche Lichtmaschine zum Aufladen der Akkus während dem Betrieb wurde auch angebaut. Diese wurde aber zwischenzeitlich wieder entfernt, da die Mähzeit auch ohne Dynamo ausreicht.
Mähwerk
Ein 4Takt Benzinmotor von Wolf Typ 4,5 HP sorgt für den Messerantrieb. Das Aggregat wurde als fertig Aufgebaute Komponente mit Tank, Auspuffanlage und Vergaser am Mäher angebaut. Bei einer dem Messer entsprechenden Mähbreite von 60 cm arbeitet sich der Motor auch durch grobes Material ferner Gras. Das Mähwerk ist in der Höhe verstellbar. Mit Gummischützern seitlich ummantelt wurde auch dafür Sorge getragen, dass kein Gras und keine Steine aus dem Mäher geschleudert werden.
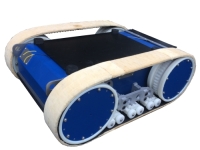
Bereifung
Der Mäher wurde mit 260mm Standardbereifung ausgestattet. Auch bekannt als Sackkarrenräder wurden die Räder in Form von Luftbereifung mit Stahlfelgen verbaut.
Gemäß den gemachten Erfahrungen im langzeitigen Einsatz wurde die Bereifung zwischenzeitlich in Zwillingsbereifung gewandelt. Zusätzlich wurden den Reifen, für besseren Bodenhalt bei nassem Gras, auch Schneeketten aufgezogen.
Lenkung
Ursprünglich wurde der Mäher wie ein Auto gelenkt. Dies hatte den Nachteil dass, mit einem entsprechend großen Wenderadius des Mähers, ein ständiges Rangieren unerlässlich war. Daher wurde der Mäher kurzerhand zur Differenzial-Lenkung umgebaut. Die zwei Antriebsmotoren im Heck des Mähers lenken und wenden den Mäher über die Räder. Der Mäher wendet hierdurch nahezu auf der Stelle und kann auch leichter auf der Mähspur gehalten und umgesetzt werden.
Elektronik
Zur Steuerung des Mähers wird eine 40Mhz Funkfernsteuerung verwendet. Als Motorsteuerung dient eine einfache aber wirkungsgerechte Brückenschaltung mit einem klassischen NE555 zur Umsetzung von Empfängersignalen in Pulsweitenmodulation (PWM). Der Aufbau der Schaltung wurde auf Lochraster gestaltet. Zur Änderung der Fahrtrichtung wurden Relais auf der Schaltung untergebracht. Die Motorsteuerung wurde direkt am Empfänger der Fernsteuerung eingesteckt. Insgesamt steckt die Elektronik, fern ab von den Störungseinflüssen des Motors, in einem Kunststoffgehäuse auf dem Mäher.
Fernsteuerung
Gelenkt wird das Ganze mit einer MC14 von Graupner®. Die Fernsteuerung wurde eigentlich für das Fernlenken von Flugmodellen gebaut aber erfüllt auch am Mäher ihren Zweck. Standardmäßig mit zwei Kreuzknüppeln ausgestattet ist die erweiterbare 4-Kanal Steuerung wie Prädestiniert zum Steuern des Rasenmähers.
Resumee
Insgesamt wandelt der Mäher die Mäharbeit in einen gelungenen Freizeit-Spaß. Sozusagen ganz nebenbei spart der Mäher auch Mähzeit gegenüber dem herkömmlichen Mähen.

Bilder zu RC-Benzinrasenmäher Wolfi`s RC-Mäher
Unterhalb sehen Sie eine Sammlung von Bildern zu Wolfi`s RC-Mäher.

Grundstück RC Mähen

RC Rasenmäher Aufbau

RC Rasenmäher Steuerung

Rasenmäher Elektronik

Links zu RC-Benzinrasenmäher Wolfi`s RC-Mäher
Unterhalb wurde eine Sammlung von verwandten Links zu Wolfi`s RC-Mäher zusammengestellt.
(UlrichC.DE haftet nicht für das Online-Angebot der extern(

Cu-RC-Mower - Ferngesteuerter Benzinrasenmäher

2WD Benzin-Rasenmäher Fahrgestell

Cu-Mower - Ferngesteuerter Elektrorasenmäher

Mit anderen Worten:"Das Projekt wird/wurde ausserhalb der Zuständigkeit von UlrichC.DE von einem anderen Entwickler" entwickelt.
Bei Fragen, Anregungen und Kritik würde es uns freuen, wenn Sie den Entwickler direkt anschreiben.
Weitere mobile Roboterfahrzeuge