




 Sie sind hier:
Sie sind hier:- UlrichC.DE
- Project
- Old
Langzeitarchivierte Projekte
(Genutzte oder überholte Alt-Projekte)
Die Projekte unterhalb sind seit längerem abgeschlossen und werden gegenwärtig genutzt oder sind durch andere Entwicklungen ersetzt. Die Projekte sind bis auf weiteres hier archiviert.
Bei Fragen oder Anregungen zu einzelnen Projekten, würde es mich freuen wenn Sie uns direkt mit dem ![]() Kontaktformular eine Benachrichtigung hinterlassen.
Kontaktformular eine Benachrichtigung hinterlassen.
NC-Optimizer
Cu-Nc-Optimizer
03/2010NC-Optimizer ist ein praktisches Forschungsprojekt zur Optimierung von NC-Fräsdaten. Praktisch handelt es sich hierbei um eine Anwendung die, als Post-Prozessor, über Kommandozeile Fräsdaten optimiert.
Als Onlineservice steht der NC-Optimierer auch als
Der NC-Daten optimierer, optimiert NC-Fäsdaten auf Performance und Frässicherheit. Entwickelt für komplexe Frästeile sowie zur Serienfertigung ist der Optimierer als Software-Tool erhältlich.
Von: UlrichC.DE
Entwicklungsstand: offen
Projektlaufzeit: ~
Aktuell:In Betrieb
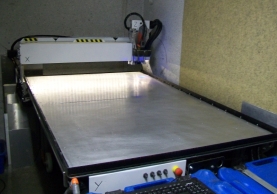
CNC-Fräse
Cu-CNC2
02/2013Entwicklung und Bau einer CNC-Fräse für den professionellen Einsatz.
Die Cu-CNC2 ist eine Weiterentwicklung der
Von: UlrichC.DE
Entwicklungsstand: abgeschlossen
Projektlaufzeit ges.: 2 Mon
Aktuell: Im Einsatz

CNC-Fräsmaschine
Cu-CNC
12/2009Entwicklung und Bau einer Portal-CNC-Fräsmaschine.
Die Cu-CNC ist eine kompakte CNC-Fräsmaschine für den professionellen Einsatz. Für das Fräsen von Aluminium, Kunststoff und Holz ist die Maschine für den täglichen Dauereinsatz optimiert.
Von: UlrichC.DE
Entwicklungsstand: abgeschlossen
Projektlaufzeit ges.: 3 Wochen
Aktuell: Im Einsatz

Roboterarm
Cu-Robotarm
01/2009Konstruktion und Fertigung eines Roboterarms für mobile Roboter und Manipulatoren.
Der Roboterarm ist für kleine bis mittelgroße Manipulatoren mit einer Auslage von mehr als 1 Meter konstruiert. Die Konstruktion ist mechanisch als Leichtbau aus Aluminium, Stahl und Kunststoffen kombiniert.
Der Roboterarm ist für mobile Roboterplattformen optimiert.
Von: UlrichC.DE
Entwicklungsstand: 100%
Aktuell:Integration zu CU-MAINIPULATOR

Greifer
Cu-Gripper
01/2009Konstruktion und Fertigung eines Roboter-Greifers.
Passend für Cu-Robotarm ist der Greifer ein Universalgerät für experimentelle Robteranwendungen. Aufgebaut in Aluminium, wird der Greifer mittels Bowdenzuantrieb bewegt.
Von: UlrichC.DE
Entwicklungsstand: 100%
Aktuell: Montiert mit Cu-Robotarm

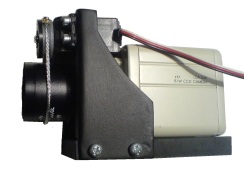
Sensoren-Gehäuse
Cu-Sensor_Front
01/2010Herstellung eines Sensorehäuses zur Unterbringung von Leuchten und Sensoren.
Cu-Sensor_Front ist als Universalgehäuse für mobile Roboter aufgebaut. Angebaut an der Front eines Robters, können Abstands-Sensoren und Kameras untergebracht sein.
Von: UlrichC.DE
Entwicklungsstand: abgeschlossen
Projektlaufzeit: 2 Stunden
Aktuell:In Betrieb

Manipulator
Cu-Manipulator
01/2009Entwicklung eines mobilen Manipulators.
Innerhalb dieses Projekts wurde ein robuster Roboter für die Verwendung als Manipulator entwickelt.
Das 6-Rad Fahrzeug mit Roboterarm ermöglicht das Manipulieren mit Gegenständen im mobilen Einsatz.
Von: UlrichC.DE
Entwicklungsstand: 100%
Projektlaufzeit ges.: 2 Monate
Aktuell:Einsatz als Testumgebung

Linearantriebe
Cu-Linear-Drive
01/2009Entwicklung eines Linearantriebs für den Einsatz in Robotern und Maschinen.
Innerhalb dieses Projekts wurde ein variierbarer Linearantrieb für mobile Roboter entwickelt.
Der Linearantrieb ist skalierbar und mit Drehgebern zur Ermittlung der Wegstrecken augestattet. Designet in der Art eines Hubkolbens, ist der Antrieb variabel einsetzbar.
Von: UlrichC.DE
Entwicklungsstand: abgeschlossen
Projektlaufzeit ges.: geplant 2 Wochen
Aktuell:Verwendung in versch. Projekten

Amphibienroboter Kettenfahrzeug
Cu-Amphibot
01/2007Entwicklung und Bau eines Amphibien-Roboters auf Basis eines Kettenfahrzeugs.
Dieses Projekt ist eines der Basis-Projekte zu
Der Amphibien-Roboter ist als schwimmfähiges Kettenfahrzeug aufgebaut. Der Kettenroboter ist mit Fernlenkung für Geländeerkundungen aufgebaut.
Von: UlrichC.DE
Entwicklungsstand: 100%

CYouToo2 Wachroboter
CYouToo2
07/2008Weiterentwicklung des Wachroboters
Das ursprüngliche Projekt zum Wachroboter CYouToo, wurde zum Abschluss gebracht. Einzelne Entwicklungslinien zum Roboter, wie Fahrgestell und weitere Projekte im Umfeld, wurden seither weiterentwickelt.
Mit diesem Projekt sind verschiedene dieser Weiterentwicklungen praktisch umgesetzt worden. Der Sicherheitsroboter CYouToo2 arbeitet nach dem Konzept eines mobilen Sicherheitssystems. Der Roboter ist für den Einsatz im Außenbereich entwickelt.
Von: UlrichC.DE
Entwicklungsstand: 100%
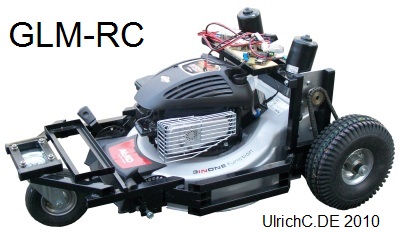
Glm-Rc Gasoline Lawn Mover
Glm-Rc
11/2010Entwicklung eines motorisierten Fahrgestellrahmens zur Integration von Benzinrasemähern.
Innerhalb dieses Projekts wurde ein Benzinrasenmäher für den Ausbau zum mobilen Roboter vorbereitet.
Der motorisierte Fahrzeugrahmen trägt Benzinrasenmäher bis ca 500ccm. Vorbereitet für den Umbau auf Fernlenkung oder auch zum Roboter ist der Fahrzeugrahmen mit einem Antrieb ausgestattet.
Von: Rainer Elsesser / UlrichC.DE
Projektlaufzeit: 2 Wochen
Entwicklungsstand: abgeschlossen
Aktuell:Weiterentwicklung zum Roboter
Embedded Computer
Cu-Embedded-PC
12/2008Konfektionierung, Konstruktion und Fertigung eines kompakten ITX-Embedded-Computers für den Einsatz in mobilen Anwendungen.
Innerhalb dieses Projekts wurde ein Embedded-System mittels handelsüblicher ITX-Hardware zusammengestellt und in einem kompakten Gehäuse untergebracht.
Der Embedded-Computer basiert auf handelsüblichen PC-Komponenten. Konfektioniert für eine Betriebsspannung von 12-24Volt ist der Embedded-Computer für mobile Roboter zugeschnitten.
Von: UlrichC.DE
Entwicklungsstand: abgeschlossen
Projektlaufzeit: 8 Stunden
Aktuell:In Testbetrieb

Antennen-Gehäuse
Cu-Antenna_Housing
07/2009Herstellung eines Gehäuses zur Unterbringung von Antennen und Sensoren.
Antennengehäuse für W-Lan Antennen.
Für die Montage an mobilen Robotern ist das Antennengehäuse robust und platzsparend aufgebaut.
Von: UlrichC.DE
Entwicklungsstand: abgeschlossen
Projektlaufzeit: 3 Stunden
Aktuell:In Betrieb
Internet Websteuerung
Cu-www-gui
02/2006Dies ist ein (praktisches) Forschungsprojekt im Bereich mobile Robotik.
Ziel des Projekts war die Entwicklung einer Websteuerung mit grafischer Benutzeroberfläche zur Ansteuerung mobiler Robotern durch das Internet(WWW).
Das Projekt zeigte die technischen Möglichkeiten auf und wurde als Grundgerüst für weitere Entwicklungen verwendet. Mit Hilfe der Websteuerung können mobile Roboter über Internet gesteuert werden. Die Steuerungsoberfläche bietet Schnittstellen zur Bild- und Datenübertragung.
Besonders die Architektur bzw. Schnittstellenthematik wurde innerhalb dieses Projekts zu einem übertragbaren Ergebnis geführt.
Von: UlrichC.DE
Entwicklungsstand: 100%
Motorsteuerung
Cu-DC-Motor-Ctrl
01/2009Entwicklung einer Motorsteuerung für DC-Motoren. Die Motorsteuerung wurde für einen Leistungsbereich bis 500 Watt bei 12 bis 24 Volt für Ansteuererung über MC-Schaltung oder auch PC entwickelt.
Die Motorsteuerung ist für mobile Roboteranwendungen mit Mikrocontroller und Schnittstellen zur Kommunikation ausgestattet. Aufgebaut in SMD-Bauweise, ist die Steuerung für mobile Roboter optimiert.
Von: UlrichC.DE
Entwicklungsstand: 100%
Roboter-Ladestation
Cu-Powerstation
07/2008Entwicklung einer Ladestation für mobile Roboter. Als InDoor-Ladestation, kann Cu-Powerstation von mobilen Robotern zum Aufladen angefahren werden.
Die Ladestation, wurde im Zusammenhang mit dem Projekt
Für mobile Roboter entwickelt, ist die Ladestation zum Laden mobiler Fahrzeuge aufgebaut. Roboterfahrzeuge können durch auffahren auf die Ladestation geladen werden.
Von: UlrichC.DE
Entwicklungsstand: abgeschlossen
Aktuell: In Gebrauch
Sicherheitsroboter
CYouToo
06/2005Entwicklung und Realisierung eines Überwachungsroboters für den Außenbereich.
Dieses umfassende Projekt wurde als erstes Kernprojekt für den Robotikbereich bei UlrichC.DE entwickelt. Der enstandene Wachroboter ist innerhalb des Projekts in weiten Teilen detailiert dokumentiert. CYouToo kann im Außenbereich als Wachroboter eingesetzt werden. Ausgestattet mit Sensoren zur Überwachung, können Wachaufgaben Softwaretechnisch skaliert sein.
Von: UlrichC.DE
Entwicklungsstand: abgeschlossen
Aktuell:In Betrieb als
Entwicklungswerkzeug zur Softwareentwicklung

Warnlampe für Roboterfahrzeuge
Cu-Warn_light
01/2008Warnlampe für mobile Roboter.
Zur Sicherung von Fahrzeugen im Außenbereich ist die kleine Warnlampe als Anbauteil entwickelt.
Von: UlrichC.DE
Entwicklungsstand: abgeschlossen
Projektlaufzeit: 2 Stunden
Aktuell:In Betrieb
Internet Kameraroboter
Cu-Webbot
05/2007Entwicklung einer - mobilen - Roboter-Kamera-Plattform für den Innenbereich mit Websteuerung.
Cu-Webbot kann als mobile Kamera in Heim und Büro eingesetzt sein. Als Informationssystem wird die Kameraplattform über Internet gesteuert.
Von: UlrichC.DE
Entwicklungsstand: 100%

Cu-R-Control
05.05/2007Entwicklung einer modularen Robotersteuerung zur Steuerungsentwicklung und experimentelle Zwecke. Cu-R-Control kann auch als Schaltungssammlung mit Datenblättern verstanden werden.
Die Roboterelektronik ist unkompliziert auf Lochraster-Platinen aufgebaut. Ideal für Einsteiger in die mobile Robotik, basieren alle Schaltungen auf dem jeweils einfachsten Prinip.
Von: UlrichC.DE
Entwicklungsstand: abgeschlossen
(Erweiterungen nach Bedarf)
Kettenfahrgestell
Cu-Chain-ChaSSIS(Next)
01/2007Weiterentwicklung des Kettenfahrwerks
Innerhalb dieses Projekts wurden weitere Variationen und Versionen zum OpenSource-Fahrgestells projektiert.
Von: UlrichC.DE
Entwicklungsstand: Abgeschlossen
Objektiv mit Servoverstellung
Cu-Servo-Zoom
01/2008Servoverstellung kleiner Objektive mittels Servo.
Erweiterung eines Kleinobjektivs für Servo-Zoom-Funktionalität.
Von: UlrichC.DE
Entwicklungsstand: abgeschlossen
Projektlaufzeit: 5 Stunden
Aktuell:In Betrieb

GPS-Gehäuse
Cu-GPS_Housing
05/2007Herstellung eines Gehäuses zur Unterbringung von GPS und Sensoren.
Das GPS-Gehäuse ist als Stabgehäuse ausgeprägt.
Zur Montage an mobilen Robotern ist das Gehäuse den Abmessungen von GPS-Empfängern und entsprechenden Sensoren angepasst.
Von: UlrichC.DE
Entwicklungsstand: abgeschlossen
Projektlaufzeit: 3 Stunden
Aktuell:In Betrieb
Cu-Sensor-Stand
06/2007Konstruktion und Fertigung eines Servostativs für Sensoren.
Das Servostativ ist zum Umbau für handelsübliche Kameras auf Servo-Kameras aufgebaut.
Von: UlrichC.DE
Entwicklungsstand: 100%
(Dokumentation folgt)

Motorisiertes Kamerastativ
Cu-Camstand
09/2006Konstruktion und Fertigung eines motorgesteuerten Kamerastativs für handelsübliche Überwachungskameras.
Das Kamerastativ kann serieller Schnittstelle in zwei Achsen bewegt werden.
Von: UlrichC.DE
Entwicklungsstand: 100%
Dokumentation nach Bedarf
Embedded Computersystem
Cu-Embedded_System
09/2006Konstruktion, Konfektionierung und Fertigung eines kompakten Embedded-Computer-Systems für den Einsatz in Maschinen und mobilen Robotern.
Innerhalb dieses Projekts wurde ein Embedded-System mittels handelsüblicher PC-Hardware zusammengestellt und in einem kompakten Gehäuse untergebracht.
Cu-Embedded_System ist ein 12-24Volt Computersystem, aufgebaut für mobile Anwendungen.
Von: UlrichC.DE
Entwicklungsstand: abgeschlossen
Aktuell:In Betrieb

Maschinendrehgeber
Cu-Wave_Encoder*Housing
06/2006Entwicklung und Fertigung eines Wellenencoders mit Maschinengehäuse.
Von: UlrichC.DE
Entwicklungsstand: abgeschlossen
Zuletzt weiterentwickelt am 09.09/2006



