Sie sind hier:
Sie sind hier:- UlrichC.DE
- Project
- CU-AMPHIBOT
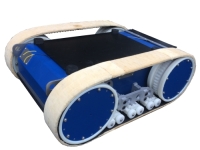
Cu-Amphibot Schwimmfähiger Amphibien- Roboter Kettenfahrzeug
Projektbeschreibung zu Amphibienroboter Schwimmfähiger Roboter Kettenfahrzeug
URL: https://www.ulrichc.de/project/cu-amphibot/
VON: Christian Ulrich DATUM: 01/2007 STATUS: abgeschlossen



Prototyp zum schwimmfähigen Amphibienroboter.
Entwicklung und Bau eines Amphibien-Roboters auf Basis eines Kettenfahrzeugs.
Der schwimmfähige Cu-Amphibot wird als Arbeitsgerät für den Außenbereich entwickelt.
Die Anforderungen für diesen Manipulator wurden aus Anfragen zum
![]() Cu-Chain-Chassis zusammengestellt.
Cu-Chain-Chassis zusammengestellt.
Intension zu Amphibienroboter Cu-Amphibot
Die Intension hinter dem Projekt ist einen Roboter für Tier- und Geländebeobachtungen in Fauna-Flora-Habitaten mit Feucht-, Sumpf- und Bruchwäldern mit angeschlossenen Bächen und kleinen Seen zu entwickeln. Diese Projektaufgabe wurde mir während eines Test-Ausflugs mit dem Wachroboter CYouToo vorgeschlagen.

Dokumentation/Projektunterlagen zu Cu-Amphibot
Die Dokumente unterhalb sind vorwiegend als PDF-Datei formatiert.
| Dokument | Beschreibung |
|---|---|
_v1_de.pdf.jpg "Datenblatt Cu-Amphibot")
|
Datenblatt zu Cu-Amphibot
Datum : 14.08.2010
|
_v1_de.doc.pdf.jpg "Dokumentation Projektbeschreibung Cu-Amphibot")
|
Dokumentation zu Cu-Amphibot
Datum : 08.12.2007
|

Bilder zu Amphibienroboter Cu-Amphibot
Zusammenbau




Elektronik

Roboter Zwischenboden

Akkuhalterung gefräst

Lenzpumpe Amphibienroboter

Anschlußdisplay Roboter
Test

Kettenroboter Antriebstest

Leitrad Einstellung

Amphibot Schwimmtest

Kettenroboter schwimmt

Links zu Amphibienroboter Cu-Amphibot
Unterhalb wurde eine Sammlung von verwandten Links zu Cu-Amphibot zusammengestellt.
(UlrichC.DE haftet nicht für das Online-Angebot der extern(

Roboter Elektronik Version 2

Freie Konstruktion Kettenfahrgestell
Roboterplattform RT-AU

Roboterplattform RT-MAX
Weitere mobile Roboterfahrzeuge