Sie sind hier:
Sie sind hier:- UlrichC.DE
- Project
- 3rdparty
- Igus_bot
Igus-Bot - Kettenroboter mit IGUS-Prototype
Externes Projekt Manipulator
URL: https://www.ulrichc.de/project/3rdparty/igus_bot/
VON: Jørgen Klausgaard DATUM: 07/2010 STATUS: abgeschlossen

Kettenfahrzeug mit IGUS-Prototype Manipulator
Kettenroboter und Manipulator mit Kameraerweiterung und Roboterarm.
Projektbeschreibung Manipulator
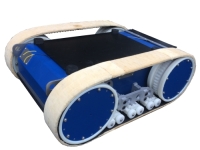
Die Basis zu dieser Roboterplattform bilden handelsübliche Industrieteile. Angefangen beim Aluminiumprofil über die Antriebsketten bis hin zu den Steuerungen sind alle Teile der Automatisierungstechnik entnommen. Angetrieben mit zwei beachtlich großen Getriebemotoren bewegt sich die Plattform auf modifizierten Energieketten. Von den Kettenrädern bis hin zu den Verkleidungsteilen ist alles CNC-Gefräst.
Das Projekt fasziniert durch seine Detaillösungen. Der Kamer-Ausleger ist mittels IGUS-Gelenk zur Funktion gebracht. Die hierfür erforderlichen Bowdenzug-Antriebe wurden mit Schrittmotoren gestaltet. Als Betatest für den Robolink von Igus wurden dabei alle Freiheitsgrade des Gelenks angesteuert.
Aber auch der Roboterarm hat es in sich! Zwei großzügig dimensionierte Linearantriebe sorgen für die notwendige Kraft auf dem Ausleger. Ausgestattet mit Freiheitgraden zum Drehen und Bewegen der einzelnen Gelenke arbeitet der Roboter in der Ausprägung als Manipulator.
Das dazugehörige Bedienpult sorgt für die notwendige Übersicht bei der Steuerung. Ein simpler Joystick bietet dabei die Ergonomie und auch den Spaß einer Baggersteuerung.
Igus-Bot wurde sozusagen in Nachtschichten für die Messe "HMI 2010 in Hannover" aufgebaut. Der Roboter wird aber auch seither ständig erweitert.
Dies ist ein Projekt von..


Bilder zu Manipulator IGUS-Prototype
Unterhalb sehen Sie eine Sammlung von Bildern zum Kettenfahrzeug mit IGUS-Prototyp.

Chassis aus Aluminium-Profilen

Unterboden Aluminiumwanne

Verkleidungsteile CNC-Fertigung

Robo Chassis Antriebsmotoren

Links zu Manipulator IGUS-Prototype
Unterhalb wurde eine Sammlung von verwandten Links zum Kettenroboter zusammengestellt.
(UlrichC.DE haftet nicht für das Online-Angebot der extern(

Roboterplattform RT-MAX

Roboterarm Gen.3

Gravier- und Fräsdienstleistungen

OpenSource Manipulator

UGV Kettenroboter zur Fernhantierung

Roboter für Demontagearbeiten

Mit anderen Worten:"Das Projekt wird/wurde ausserhalb der Zuständigkeit von UlrichC.DE von einem anderen Entwickler" entwickelt.
Bei Fragen, Anregungen und Kritik würde es uns freuen, wenn Sie den Entwickler direkt anschreiben.
Weitere mobile Roboterfahrzeuge