




 Sie sind hier:
Sie sind hier:- UlrichC.DE
- Project
- CU-WORKBOT
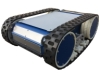
Cu-Workbot Kettenfahrzeug als Geräteträger
Projektbeschreibung zu Kettenfahrzeug als Geräteträger Arbeitsroboter
URL: https://www.ulrichc.de/project/cu-workbot/
VON: Christian Ulrich DATUM: 05/2009 STATUS: abgeschlossen

Geräteträger und Transportgerät.
Entwicklung und Bau eines Geräteträger- und Arbeitsroboters für den Außenbereich.
Cu-Workbot entspricht einem Roboterkonzept für ein robustes Arbeitsgerät. Als Geräteträger und Transportgerät soll Cu-Workbot ferngelenkt werden können.
Die Anforderungen für diesen Manipulator wurden aus verschiedene Anfragen zum ![]() Cu-Chain-Chassis zusammengestellt.
Cu-Chain-Chassis zusammengestellt.
(Weitere Informationen folgen in kürze oder auf Anfrage.)

Dokumentation/Projektunterlagen zu Arbeitsroboter Cu-Workbot
Die Dokumente unterhalb sind vorwiegend als PDF-Datei formatiert.
| Dokument | Beschreibung |
|---|---|
| Aktuell keine Dateien vorhanden. | |






Links zu Arbeitsroboter Cu-Workbot
Unterhalb wurde eine Sammlung von verwandten Links zu Cu-Workbot zusammengestellt.
(UlrichC.DE haftet nicht für das Online-Angebot der extern(

Roboter Elektronik Version 2

Freie Konstruktion Kettenfahrgestell
Roboterplattform RT-AU

Roboterplattform RT-MAX

Für das Projekt wird derzeit recherchiert und ggf. Ressourcen allokiert. Eventueller Projektstart sowie Verlauf und Statusänderungen, werden auch über
Bei Fragen, Anregungen und Kritik zu diesem Projekt würde es uns freuen wenn Sie direkt eine
News Blog:



Gerade online:5 - Heute insgesamt:766