




 Sie sind hier:
Sie sind hier:- UlrichC.DE
- Project
- Archive
Projektarchiv mit archivierten Projekten
(Archivierte Projekte in Projektpause, Testphase oder Verwendung)
Unser Projektarchiv beinhaltet einen Auszug unserer abgeschlossenen Arbeiten.
Bei Fragen oder Anregungen zu einzelnen Projekten, würde es mich freuen wenn Sie uns direkt mit dem ![]() Kontaktformular eine Benachrichtigung hinterlassen.
Kontaktformular eine Benachrichtigung hinterlassen.
Die Projekte unterhalb sind seit längerem abgeschlossen und bis auf weiteres archiviert.

Cu-Copter-H130 Racecopter Drohne
Cu-Copter-H130
05/2017Entwicklung eines Mini Racecopter auf Basis eines 130 H-Frame.
Innerhalb dieses Projekts wurde ein miniaturisierter Racecopter gebaut.
Von: UlrichC.DE
Entwicklungsstand: abgeschlossen
Projektlaufzeit ges.: 16PH
Aktuell: Im Einsatz

Cu-Copter-H250-2 Racecopter Drohne
Cu-Copter-H250-2
04/2017Entwicklung eines Racecopter auf Basis eines 250 H-Frame.
Innerhalb dieses Projekts wurde ein Racecopter gebaut.
Von: UlrichC.DE
Entwicklungsstand: abgeschlossen
Projektlaufzeit ges.: 40PH
Aktuell: Im Einsatz

Cu-Copter-H250 Mulikopter Drohne
Cu-Copter-H250
09/2016Entwicklung eines Quadrocopters für Videoflüge.
Innerhalb dieses Projekts wurde ein Quadrocopter projektiert.
Von: UlrichC.DE
Entwicklungsstand: abgeschlossen
Projektlaufzeit ges.: 1PM
Aktuell: Umgebaut zu V2

Cu-Copter-Z Mulikopter Drohne
Cu-Copter-Z
10/2015Entwicklung eines Multicopter auf Basis eines Modulkonzepts.
Innerhalb dieses Projekts wurden verschiedene Multicopter aufgebaut.
Von: UlrichC.DE
Entwicklungsstand: abgeschlossen
Projektlaufzeit ges.: 1PM
Aktuell: Im Einsatz

FPV-Stativ
Cu-FPV-POD
09/2016FPV-POD zur Erweiterung mobiler UGV Roboterplattformen.
Von: UlrichC.DE
Entwicklungsstand: abgeschlossen
(Erweiterungen nach Bedarf)
FPV-Stativ
Cu-FPV-Tripod
09/2016FPV-Stativ für LongRange FPV.
Von: UlrichC.DE
Entwicklungsstand: abgeschlossen
(Erweiterungen nach Bedarf)

Cu-Copter-X250 Mulikopter Drohne
Cu-Copter-X250
03/2015Entwicklung eines Quadrocopters auf Basis eines 250 Frame.
Innerhalb dieses Projekts wurde ein Quadrocopter aufgebaut.
Von: UlrichC.DE
Entwicklungsstand: abgeschlossen
Projektlaufzeit ges.: 1PM
Aktuell: Im Einsatz

Cu-FPV-Console FPV Bedienpult
Cu-FPV-Console
03/2015Entwicklung eines Senderpult mit Monitor für FPV First Person View.
Fernsteuerung zur Fernhantierung von UAV, UAS und UGV ohne direkte Sichtverbindung.
Von: UlrichC.DE
Entwicklungsstand: abgeschlossen
Projektlaufzeit ges.: 1PM
Aktuell: Im Einsatz

Roboter Handsteuerung
Cu-Control-Panel
03/2014Handsteuerung für mobile Roboter und Manipulatoren.
Von: UlrichC.DE
Entwicklungsstand: abgeschlossen
(Entwicklung nach Bedarf)

Roboter Bedienpult
Cu-Control-Case
10/2009Bedienpult für mobile Roboter und Manipulatoren.
Von: UlrichC.DE
Entwicklungsstand: abgeschlossen
(Entwicklung nach Bedarf)
Designstudie für Sicherheitsroboter
Cu-Secure-Robot
10/2009Autonomer Sicherheitsroboter Designstudie.
Die Desinstudie enthält verschiedene Entwürfe für die Umsetzung eines Sicherheitsroboter.
Von: UlrichC.DE
Entwicklungsstand: 5%
(Entwicklung nach Bedarf)

AC Schaltsteuerung
Cu-AC-Ctrl
05/2014Cu-AC-Ctrl ist eine Entwicklung für eine Steuereinheit zum überwachen und fernsteuern von 230V Stromversorgungen.
Von: UlrichC.DE
Entwicklungsstand: abgeschlossen
Projektlaufzeit ges.: 5PT
Aktuell: Im Einsatz

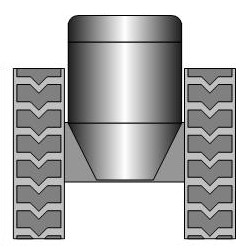
Robot Plattform
Cu-Chain-Chassis(Pro)
04/2011Vorstufe zur Produktentwicklung auf Basis des Kettenfahrzeugs
Innerhalb dieses Projekts wurde eine Produkt-Vorstufe für eine Roboterplattform, aus Konstruktionen zu Cu-Chain-Chassis ausgekoppelt.
Geeignet für den Außenbereich, ist die Roboterplattform eine Fahrzeugbasis für mobile Roboteranwendungen im täglichen Einsatz.
Von: UlrichC.DE
Entwicklungsstand: Abgeschlossen
Aktuell: Test/Auswertung

Ferngesteuerter Elektro Rasenmäher
Cu-Mower
04/2012Roboterplattform mit Mähwerk.
In Ausprägung -Ferngelenkter Elektrorasenmäher für den täglichen Einsatz-, ist der Cu-Mower als Roboterplattform mit Mähwerk aufgebaut.
Von: UlrichC.DE
Entwicklungsstand: Abgeschlossen
Aktuell: Im Einsatz

IScout-6WD
IScout-6WD
04/2010Entwicklung eines IScout-6WD - mobiler Inspektions- Kamera Roboter
Innerhalb dieses Projekts wurde ein mobiler Inspektionsroboter im Kleinformat entwickelt. Speziell für Untersuchungen in schwer zugänglichen Räumen, wie Zwischenboden oder Lüftungsschächte, aufgebaut.
Von: Hans-Jörg Leu / UlrichC.DE
Entwicklungsstand: abgeschlossen
Projektlaufzeit ges.: geplant 2 Wochen
Aktuell:Testphase

Sensorradar
Cu-Sensorhead
04/2009Entwicklung eines Sensorkopfs / Sensorradars für mobile Roboter.
Cu-Sensorhead ist als kompaktes Sensoregehäuse aufgebaut. Neben einem integrierten Mikrokontroller, ist der Sensorkopf mit Funktionen zur Rotoation sowie einem Auslegearm ausgestattet.
Von: UlrichC.DE
Entwicklungsstand: 100%
Projektlaufzeit ges.: geplant 3 Wochen
Aktuell:Elektronikentwicklung

Headmount für IPhoneTM
Cu-IPhone-Headmount
10/2011Headmount und Halterung für IPhones.
Mit dem Headmount sind Videoaufnahmen ohne manuelles Fokusieren möglich.
Von: UlrichC.DE
Entwicklungsstand: abgeschlossen
Projektlaufzeit: 3 Stunden
Aktuell:In Verwendung

Robotersteuerung
Cu-R-Control2
10/2009Entwicklung einer modularen Robotersteuerung zum Steuerungsaufbau und für experimentelle Zwecke. Cu-R-Control2 wurde als Folgeprojekt zu Cu-R-Control entwickelt. Das Projekt birgt verschiedene Schaltungen für mobile Roboter und Maschinen.
Die Suite an Roboterelektronik, beinhaltet Schaltpläne, Datenblätter und Beschreibungen für die Steuerung mobiler Roboter.
Von: UlrichC.DE
Entwicklungsstand: 100%
(Erweiterungen nach Bedarf)



