




 Sie sind hier:
Sie sind hier:- UlrichC.DE
- Product
- Robotic
- CU-CHAIN-CHASSIS
- Plans
- Drive

Cu-Chain-Chassis Konstruktionen zum Antrieb
DRIVE (Antrieb)
Cu-Chain-Chassis:
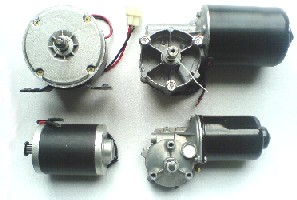
Abb.:Motoren für Fahrzeugantriebe
Die Drive-Pläne enthalten verschiedene Konstruktionsvarianten, mit den jeweiligen Zeichnungen, zum Fahrgestellantrieb.
Zwischen den einzelnen Variationen kann je nach Anforderungen, oder auch technischen Möglichkeiten, gewählt werden.
Bei der Konstruktion der einzelnen Variationen, sind die gängigsten Motorentypen (DC-Motoren und DC-Getriebemotoren) und Untersetzungen (Schneckengetriebe, Riemengetriebe, Direktantriebe) berücksichtigt. Das Skalieren und Kombinieren von einzelnen Kernlösungen innerhalb der Konstruktionen, wie ändern der Motoren oder Übersetzungen, ist möglich.
Bei der Wahl eines Antriebs bzw. des Antriebsmotors wird empfohlen zunächst die gewünschte Höchstgeschwindigkeit zu bestimmen, um dann einen entsprechenden Antrieb gemäß dem Fahzeuggewicht zu skalieren. In der Regel kann ein einfacher Direktantrieb eingesetzt werden. Die Vorteile und Notwendigkeit eines Zwischengetriebes sollte mit steigender Antriebsleistung einbezogen werden. Dabei gilt es besonders ein Fahrzeugantrieb mit hoher Selbsthemmung, beding durch hochübersetzte Getriebemotoren, zu vermeiden.
.jpg)
Antrieb:Schneckengetriebe direkt
Variation Snailsgear -direkt
Als weitere Alternative zur Antriebsform mit Schneckengetriebe bzw. auch Winkeltrieb, wurde der Antriebsmotor in dieser Konstruktion ohne zusätzlich Antriebsübersetzung vorgesehen. Die Herstellung dieses mittels Kupplung gebundene Fahrzeugrantrieb ist mit nur wenig Aufwand verbunden.
| Dokument | Beschreibung |
|---|---|
_v1.doc.pdf.jpg "Dokumentation Cu-Chain-Chassis")
|
Dokumentation zur Konstruktion
Datum : 26.01.2008
|
_v1.vsd.pdf.jpg "Technische Zeichnung Cu-Chain-Chassis")
|
Technische Zeichnung
Datum : 03.11.2007
|
_v1.xls.pdf.jpg "Stückliste Cu-Chain-Chassis")
|
Stückliste zum Antrieb. (Einzelteile und Materiallängen)
Datum : 03.11.2007
|

|
Stücklisten
Datum : 03.11.2007
|
Bilder zur Konstruktion:
/tumb_010.jpg "Bild 010")
/tumb_020.jpg "Bild Zahnkonus-Aufnahme")
/tumb_030.jpg "Bild 030")
/tumb_100.jpg "Bild 100")
.jpg)
Antrieb: Schneckengetriebe
Variation Snailsgear -Schneckenantrieb (oder auch Scheibenwischermotoren)
Diese Anriebsvariante wurde als erweiterte Antriebslösung entwickelt.
Die verwendeten DC-Getriebemotoren sind hoch übersetzt und eignen sich besonders für kräftige und zugleich langsame Fahrgestellantriebe. Eine zusätzliche Antriebsübersetzung ermöglicht zudem eine Skalierung des Antriebs ferner der Getriebeübersetzung des Antriebsmotors.
| Dokument | Beschreibung |
|---|---|
_v2.doc.pdf.jpg "Dokumentation Cu-Chain-Chassis")
|
Dokumentation zur Konstruktion
Datum : 26.01.2008
|
_v1.vsd.pdf.jpg "Technische Zeichnung Cu-Chain-Chassis")
|
Technische Zeichnung
Datum : 17.05.2007
|
_v2.vsd.pdf.jpg "Technische Zeichnung Cu-Chain-Chassis")
|
Technische Zeichnung
Datum : 23.05.2009
|
_v1.xls.pdf.jpg "Stückliste Cu-Chain-Chassis")
|
Stückliste zum Antrieb. (Einzelteile und Materiallängen)
Datum : 17.05.2007
|
|
|
Stücklisten
Datum : 17.05.2007
|
Bilder zur Konstruktion:
/tumb_200.jpg "Bild 200")
/tumb_100.jpg "Bild 100")
/tumb_300.jpg "Bild 300")
/tumb_400.jpg "Bild 400")
.jpg)
Antrieb:DC-Motoren
Variation DC-Motoren (oder auch E-Scootermotoren)
Der Antrieb basiert auf handelsüblichen E-Motoren die über eine Zahnriemenübersetzung für einen geräuscharmen und schnellen Fahrzeugantrieb sorgen.
Diese Antriebsvariation kann mit handelsüblichen Motoren dieser Art bis auf 2x250 Watt ausgebaut werden. Die Maße des hierfür vorbereiteten Motors sind im Plan verzeichnet.
| Dokument | Beschreibung |
|---|---|
_v1.doc.pdf.jpg "Dokumentation Cu-Chain-Chassis")
|
Dokumentation zur Konstruktion
Datum : 26.01.2008
|
(test)_v1.doc.pdf.jpg "Testbericht Cu-Chain-Chassis")
|
Praktischer Motortest
Datum : 26.01.2008
|
_v1.vsd.pdf.jpg "Technische Zeichnung Cu-Chain-Chassis")
|
Technische Zeichnung
Datum : 03.09.2005
|
_v1.xls.pdf.jpg "Stückliste Cu-Chain-Chassis")
|
Stückliste zum Antrieb. (Einzelteile und Materiallängen)
Datum : 02.07.2005
|
|
|
Stücklisten
Datum : 02.07.2005
|
Bilder zur Konstruktion:
/tumb_010.jpg "Bild Riemenräder Antrieb")
/tumb_015.jpg "Bild Kunststoff Riemenrad")
/tumb_020.jpg "Bild Motoraufnahme Fräsen")
/tumb_030.jpg "Bild 030")
 Begleitinformationen zu den Fahrgestellantrieben.
Begleitinformationen zu den Fahrgestellantrieben.
Die Begleitinformationen enthalten Informationen zu den Antrieben allgemein.
| Dokument | Beschreibung |
|---|---|
_v1.doc.pdf.jpg "Layout Illustrierte Übersicht")
|
Übersicht zu allen Antriebs-Variationen
Datum : 24.06.2008
|


